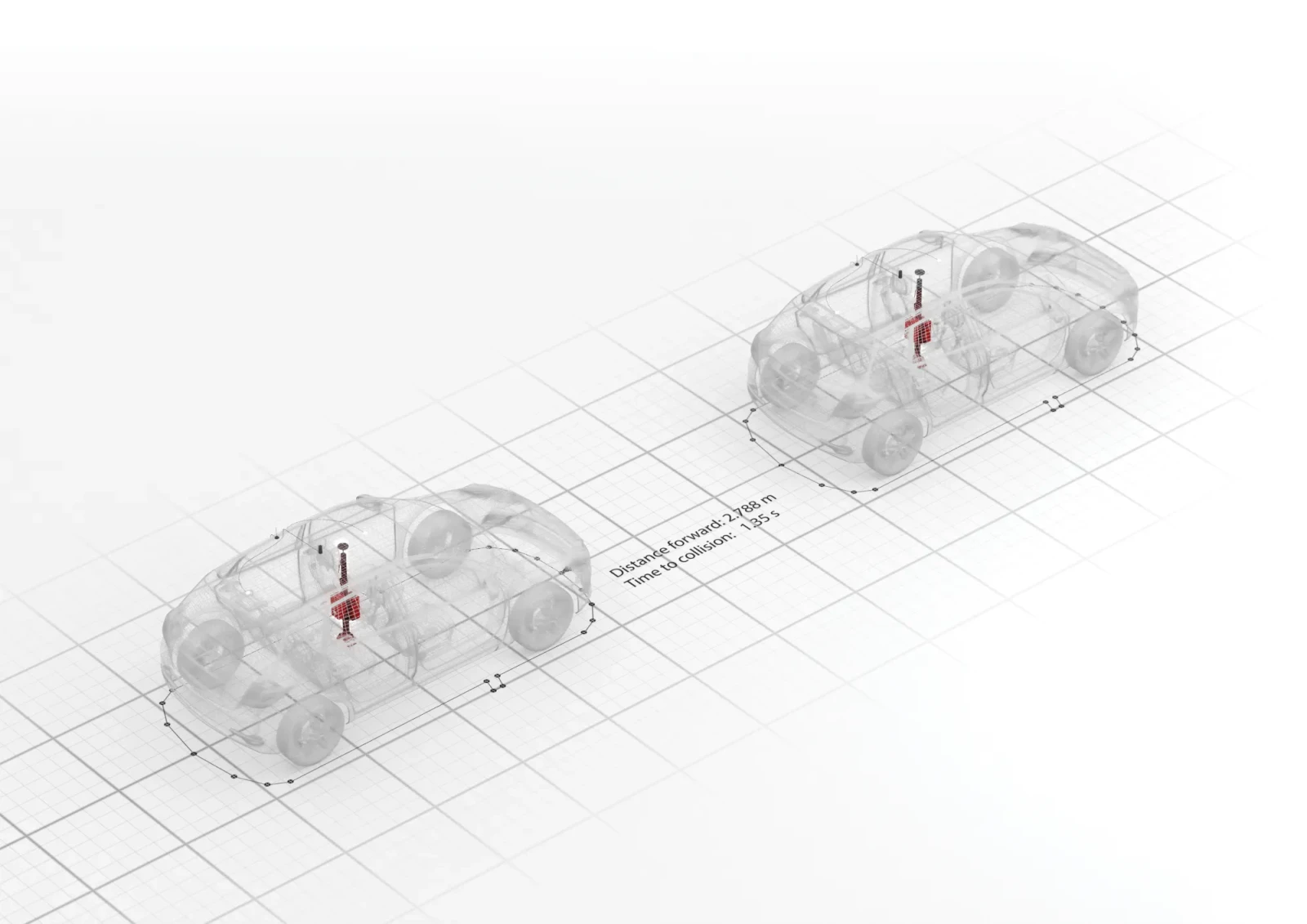
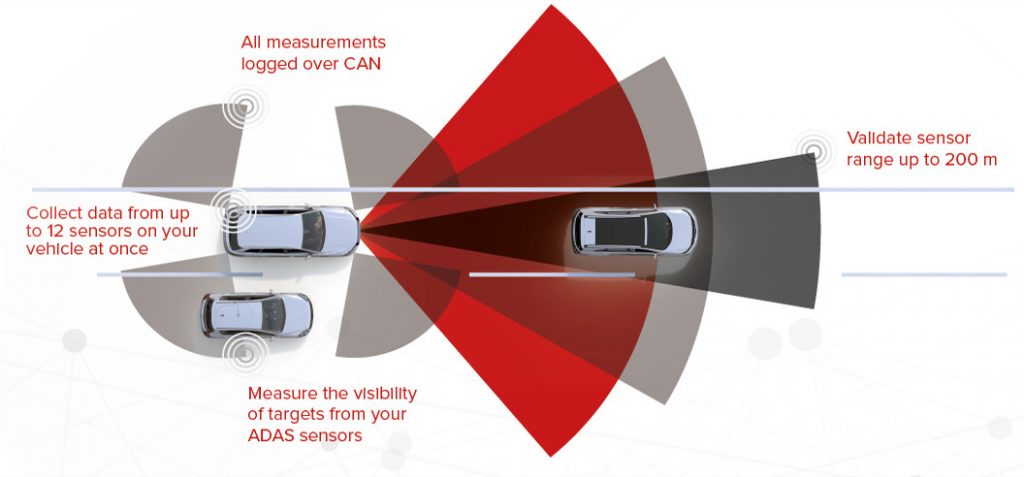
Multiple sensor point validation in real time
V2V and V2X measurements in real-time
Up to 1km range between hunter and targets
Vehicle to lane measurements for lane-support testing
CAN 2.0 and CAN-FD interface
Driving robot and vehicle/pedestrian platform interface
Configure hunter and targets with polygons to measure the closet point between objects
Software suite included for configuration, real-time monitoring and data processing
Network DGPS for passing correction data between vehicles
Training available













 TOP
TOP